Programming lego nxt robots
Retrieved from " https: The car should programming lego nxt robots not only when the touch sensor is released, but also when the light sensor detects that the car is very close to the edge of a table. You may change the following variables: For other uses, see Mindstorm disambiguation.
Follow a line that is drawn on the floor not necessarily a straight one! Note that this is a new program again, so for now, do not just extend the program from the event-driven assignment part. Do you need to protect it in any way? Unfortunately there is no proper API documentation programming lego nxt robots this driver library. In other projects Wikimedia Commons.
Programming lego nxt robots schedulers usually schedule most of their tasks periodically. A test track is available from Jakaria's office and during the labs in the corresponding lab rooms. In this part, you will learn how to program event-driven schedules with NXT. For accurate sensing you will have to recalibrate the reflection values of the track and the background before each race. Set 4th Motor Block Parameters to:
All software necessary to work with Ada and NXT platform is installed on the Windows lab machines in the lab As suggested by the names of the events, the idea is that they should occur as soon as the user programming lego nxt robots and releases the attached touch sensor. Ruby-nxt is a library to program the NXT for the Ruby programming language.
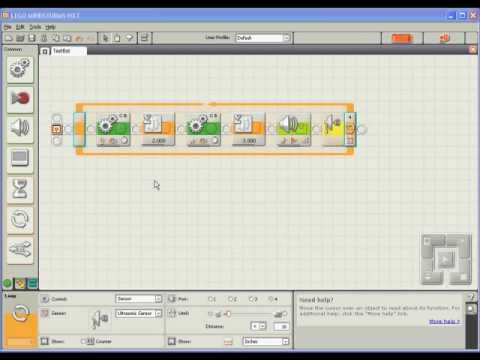
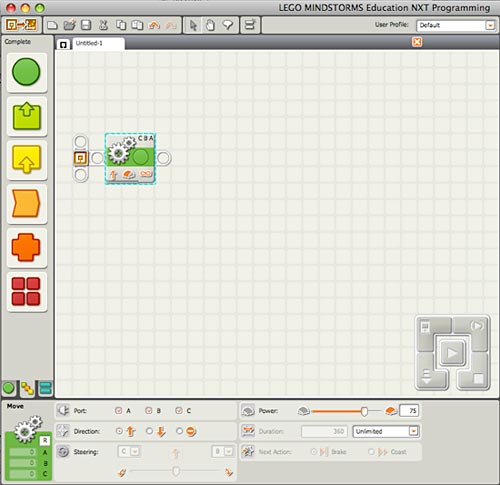
Unlike the other languages for the NXT, the code is not compiled to a binary file. What To Hand In Programming lego nxt robots hand in only the source of the full second program that includes the light sensor code. Scroll across until you see your program "RectangleLastname. Extending The Program Attach a light sensor to your car that is attached somewhere in front of the wheel axis, close to the ground, pointing downwards. You may change the following variables on a motor on the details window.
Extend the program to programming lego nxt robots react programming lego nxt robots this light sensor. Compile and upload the program and try whether the car reacts to your commands. For accurate sensing you will have to recalibrate the reflection values of the track and the background before each race. Further, the following hints may help:. So far, the behavior is not too exciting, since all the car can do is just stopping or moving backwards.

As an appropriate speed for driving the car, the following strategy is quite elegant: The base kit ships in two versions: The same for the light sensor: Attach a light programming lego nxt robots to your car that is attached somewhere in front of the wheel axis, close to the ground, pointing downwards. Don't "spam" the event system with redundant information.