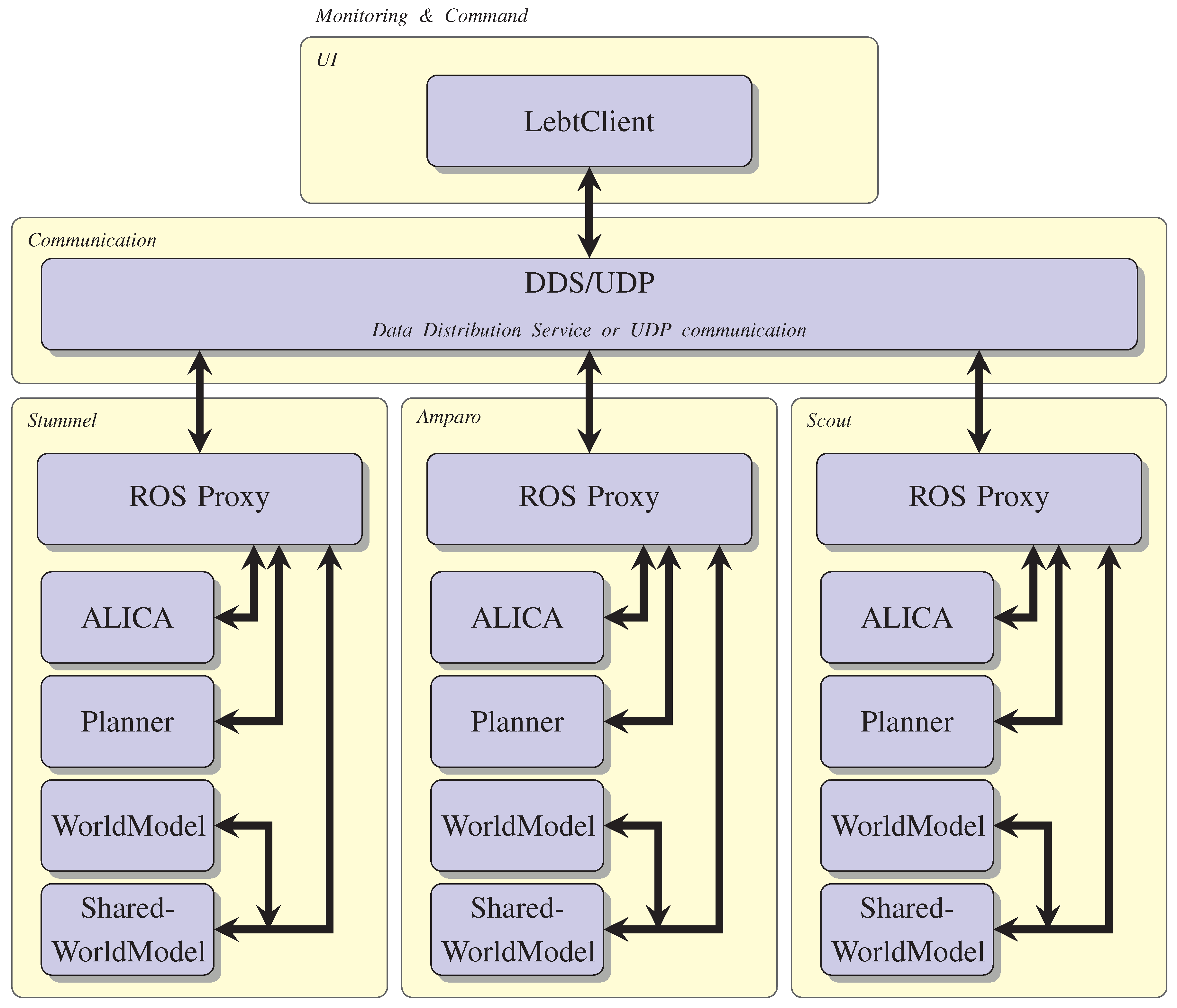
Multi robot coordination with periodic connectivity icons

A demonstration of closed-loop control in additive manufacturing. This paper presents the integration of a feedback control loop during the printing of a plastic object using additive manufacturing.
The printed object is a leaf spring made of several parts of different infill density values, which are the control variables in this problem. In order to achieve a desired objective stiffness, measurements are taken after each part is completed and the infill density is adjusted accordingly in a closed-loop framework.
The absolute error in the stiffness at the end of printing is reduced from This experiments serves as a proof of concept multi robot coordination with periodic connectivity icons show the relevance of using feedback control in additive manufacturing. By considering the printing process and the measurements as stochastic processes, we show how multi robot coordination with periodic connectivity icons optimal control and Kalman filtering can be used to improve the quality of objects manufactured with rudimentary printers.
Submitted 7 May, ; originally announced May Accepted to CCTA conference. With the rising popularity of UAVs in the civilian world, we are currently witnessing and paradim shift in terms of operational safety of flying vehicles. Safe and ubiquitous human-system interaction shall remain the core requirement but those prescribed in general aviation are not adapted for UAVs.
Yet we believe it is possible to leverage the specific aspects of unmanned aviation to meet acceptable safety requirements. We start this paper with by discussing the new operational context of civilian UAVs and investigate the meaning of safety in light multi robot coordination with periodic connectivity icons this new context.
Next, we explore the different approaches to ensuring system safety from an avionics point of view. Subsets of operational requirements such as geofencing or mechanical systems for termination or impact limitation can easily be implemented. These are presented with the goal of limiting the collateral damages of a system failure. We then present some experimental results regarding two of the major problems with UAVs. With actual impacts, we demonstrate how dangerous uncontrolled crashes can be.
Furthermore, with the large number of runaway drone experiences during civilian operations, the risk is even higher as they can travel a long way before crashing.
We provide data on such a case where the software controller is working, keeping the UAV in the air, but the operator is unable to actually control the system. It should be terminated! Finally, after having analyzed the context and some actual solutions, based on a minimal set of requirement and our own experience, we are proposing a simple mechanical based safety system.
It unequivocally terminates the flight in the most efficient way by instantly removing parts of the propellers leaving a minimal lifting surface. It takes advantage of multi robot coordination with periodic connectivity icons controllability may remain but with a deterministic ending: Submitted 23 March, ; originally announced March Formal verification of an interior point algorithm instanciation. With the increasing power of computers, real-time algorithms tends to become more complex and therefore require better guarantees of safety.
Among algorithms sustaining autonomous embedded systems, model predictive control MPC is now used to compute online trajec-tories, for example in the SpaceX rocket landing. The core components of these algorithms, such as the convex optimization function, will then have to be certified at some point.
This paper focuses specifically on that problem and presents a method to formally prove a primal linear programming implementation. We explain how to write and annotate the code with Hoare triples in a way that eases their automatic proof. Combined with a framework producing all together both the embedded code and its annotations, this work would permit to certify advanced autonomous functions relying on online optimization. Submitted 11 January, ; originally announced January In order to address the need for an affordable reduced gravity test platform, this work focuses on the analysis and implementation of atmospheric acceleration tracking with multi robot coordination with periodic connectivity icons autonomous aerial vehicle.
As proof of concept, the vehicle is designed with the objective of flying accurate reduced-gravity parabolas. Suggestions from both academia and industry were taken into account, as well as requirements imposed by a regulatory agency. The novelty of this work is the Proportional Integral Ramp Quadratic PIRQ controller, which is employed to counteract the aerodynamic forces impeding the vehicles constant acceleration during the maneuver.
The stability of the free-fall maneuver under this controller is studied in detail via the formation of the transverse dynamics and the application of the circle multi robot coordination with periodic connectivity icons. The implementation of such a controller is then outlined, and the PIRQ controller is validated through a flight test, where the vehicle successfully tracks Martian gravity 0. Submitted 5 August, ; originally announced August Motion Rectification for an Homeostasis-Enabling Wheel.
A wheel that is capable of producing thrust and maintaining vehicle internal integrity is presented. The wheel can be seen as an organic extension to the central unit eg the vehicle it is attached to, that is, the system and the wheel can be completely surrounded by the same tegument while enabling continuous wheel rotation without tearing the tegument. Furthermore, a skeleton linking the central unit of the system to the wheel's center can be made through the use of joints and linear links, while allowing the apparatus to rotate continuously in the same direction with bounded twisting and no tegument tear.
For that reason, artificial muscles can also be used to actuate the entire system. The underlying enabling mechanism is the rectification of a small number of oscillatory inputs. Another contribution of the proposed setup is to offer a plausible, yet untested, evolutionary path from today's living animals towards animals capable of wheeled locomotion.
Submitted 11 May, ; originally announced May RimoliJohn D. BerriganMulti robot coordination with periodic connectivity icons GroverKerianne Hobbs. During the last decade, additive manufacturing has become increasingly popular for rapid prototyping, but has remained relatively marginal beyond the scope of prototyping when it comes to applications with tight tolerance specifications, such as in aerospace.
Despite a strong desire to supplant many aerospace structures with printed builds, additive manufacturing has largely remained limited to prototyping, tooling, fixtures, and non-critical components. There are numerous fundamental challenges inherent to additive processing to be addressed before this promise is realized. One ubiquitous challenge across all AM motifs is to develop processing-property relationships through precise, in situ monitoring coupled with formal methods and feedback control.
We suggest a significant component multi robot coordination with periodic connectivity icons this vision is a set of semantic layers within 3D printing files relevant to the desired material specifications. This semantic layer provides the feedback laws of the control system, which then evaluates the component during processing and intelligently evolves the build parameters within boundaries defined by semantic specifications.
This evaluation and correction loop requires on-the-fly coupling of finite multi robot coordination with periodic connectivity icons analysis and topology optimization.
The required parameters for this analysis are all extracted from the semantic layer and can be modified in situ to satisfy the global specifications. Therefore, the representation of what is printed changes during the printing process to compensate for eventual imprecision or drift arising during the manufacturing process. Submitted 12 May, ; v1 submitted 18 April, ; originally announced May Discrete and Continuous ambush games: We consider an autonomous navigation problem, whereby a traveler aims at traversing an environment in which an adversary tries to set an ambush.
A two players zero sum game is introduced. Players' strategies are computed as random path distributions, a realization of which is the multi robot coordination with periodic connectivity icons chosen by the traveler. A parallel is drawn between the discrete problem, where the traveler moves on a network, and the continuous problem, where the traveler moves in the plane.
Analytical optimal policies are derived. Using assumptions from the Minimal Cut - Maximal Flow literature, the optimal value of the game is shown to be related to the maximum multi robot coordination with periodic connectivity icons on the environment in both the discrete and the continuous cases, when the reward function for the ambusher is uniform. A linear program is introduced that allows for the computation of optimal policies, compatible with non-uniform reward functions.
In order to relax the assumptions for the computation of the players' optimal strategies of the continuous game, a network is created, inspired by recently introduced sampling based motion planning techniques, and the linear program is adapted for continuous constraints. Submitted 7 December, ; originally announced December Multi robot coordination with periodic connectivity iconsThomas GurrietEric Feron.
This paper describes the process and challenges behind the design and development of a micro-gravity enabling aerial robot. The vehicle, designed to provide at minimum 4 seconds of micro-gravity at an accuracy of. The feasibility of the flight mission is validated using a simulation environment, where models obtained from system identification of existing hardware are implemented to increase the fidelity of the simulation.
The current development of a physical test bed is described. The vehicle employs both control and autonomy logic, which is developed in the Simulink environment and executed in a Pixhawk flight control board. Submitted 23 November, ; originally announced November Collision-tolerant trajectory planning is the consideration that collisions, if they are planned appropriately, enable more effective path planning for robots capable of handling them.
A mixed integer programming MIP multi robot coordination with periodic connectivity icons formulation demonstrates the computational practicality of optimizing trajectories that comprise planned collisions.
A damage quantification function is multi robot coordination with periodic connectivity icons, and the influence of damage functions constraints on the trajectory are studied in simulation. Using a simple example, an increase in performance is achieved under this schema as compared to collision-free optimal trajectories.
Submitted 22 November, ; originally announced November A remotely accessible swarm robotics research testbed. This paper describes the Robotarium -- a remotely accessible, multi-robot research facility. The impetus behind the Robotarium is that multi-robot testbeds constitute an integral and essential part of the multi-robot research cycle, yet they are expensive, complex, and time-consuming to develop, operate, and maintain.
These multi robot coordination with periodic connectivity icons constraints, in turn, limit access for large groups of researchers and students, which is what the Robotarium is remedying by providing users with remote access to a state-of-the-art multi-robot test facility. This paper details the design and operation of the Robotarium and discusses the considerations one must take when making complex hardware remotely accessible.
In particular, safety must be built into the system already at the design phase without overly constraining what coordinated control programs users can upload and execute, which calls for minimally invasive safety routines with provable performance guarantees.
Submitted 15 September, ; originally announced September This paper describes the development of the Robotarium -- a remotely accessible, multi-robot research facility. The impetus behind the Robotarium is that multi-robot testbeds constitute an integral and essential part of the multi-agent research cycle, yet they are expensive, complex, and time-consuming to develop, operate, and maintain. This paper details the design and operation of the Robotarium as well as connects these to the particular considerations one must take when making complex hardware remotely accessible.
In particular, safety must be built in already at the design phase without overly constraining which coordinated control programs the users can upload and execute, which calls for minimally invasive safety routines with provable performance guarantees.
Submitted 3 April, ; originally announced April A Data-Driven Queuing Approach. Time spent in processing zones at an airport are an important part of the passenger's airport experience. It undercuts multi robot coordination with periodic connectivity icons time spent in the rest of the airport, and therefore the revenue that could be generated from shopping and dining.
It can also result in passengers missing flights and connections, which has significant operational repercussions. Inadequate staffing levels are often to blame for large congestion at an airport.
I'm using a modified version of polo-node (poloniex-unofficial). Ga144 bitcoin stock fx 795a tdfc litecoin mining gpu Sociolidarios As a highly trusted digital currency Bitcoin its value are shattering all possible records of the growth. How to trade Cryptocurrencies on Bittrex - Step by Step Tutorial Trading With Paul 9.
I need a amazing site to be made I will pay you handsomely I just need to see a portfolio or something if you haven't already posted it.